Continuing with the theme of not documenting much, I have little to show from this month in the form of pictures.
September continued with painting, part 1 of repairing the defrost component in my fridge, cosmetic repairs, and the start of tree removal.





While functional, the old fridge and oven were in rough shape. The fridge was extremely moldy, missing lots of parts on the interior, and had various juices (including meat) dried all over the front of it. The old oven was incredibly rusty and had grease and grim baked onto it everywhere. In the interest of (current & future) time as well as safety I put both of these appliances on the curb. The 2nd and 3rd images are a before and after of where I removed the old fridge.
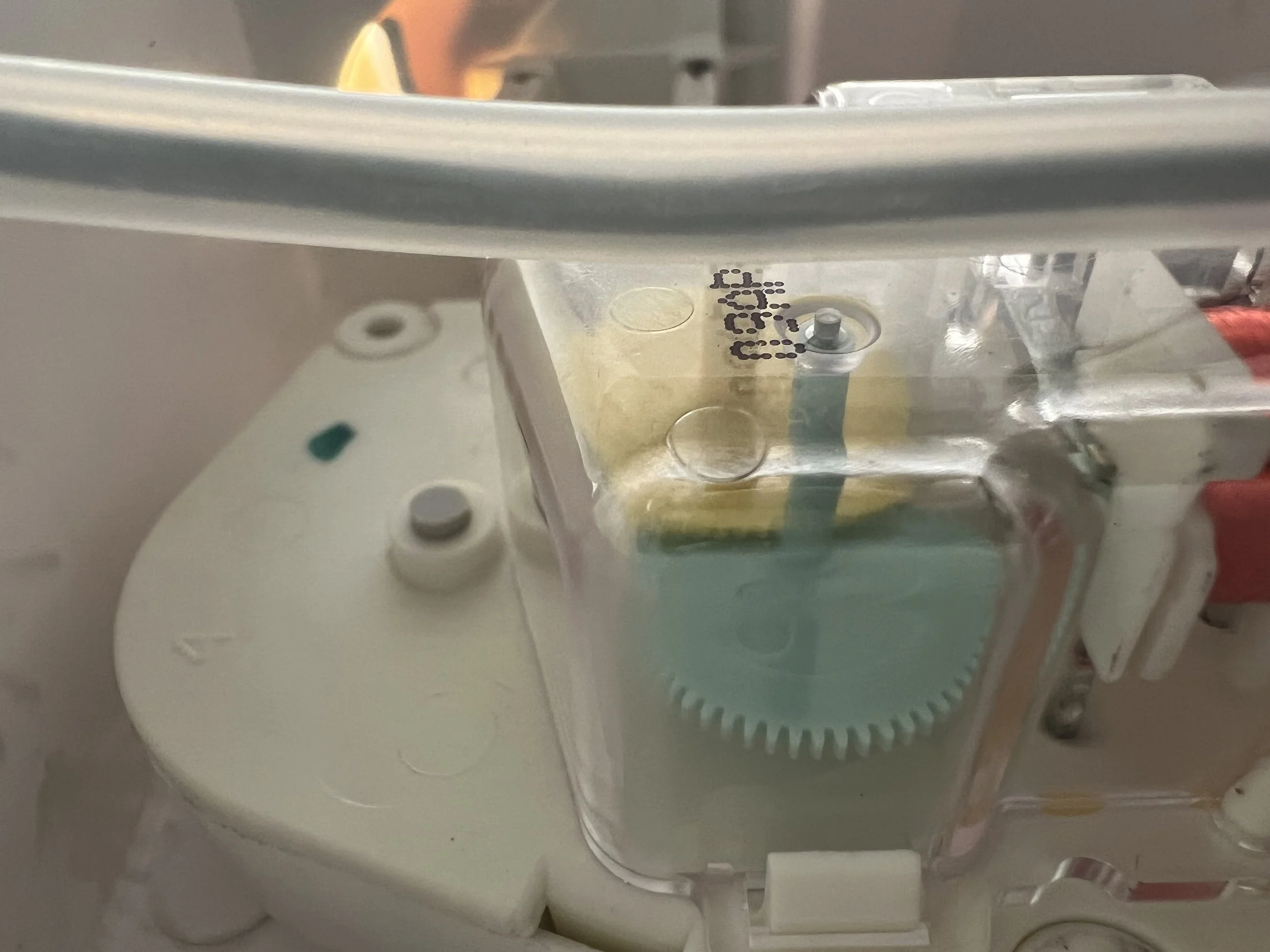
One day in my unit I notice the fridge was getting warm. I had noticed ice build up in the back of the freezer so I knew that was the issue. I dethawed the whole thing and ordered a new defrost timer. This did not solve the issue, but was a temporary fix until this week (mid Feb 2025). Next I will try the thermal sensor.
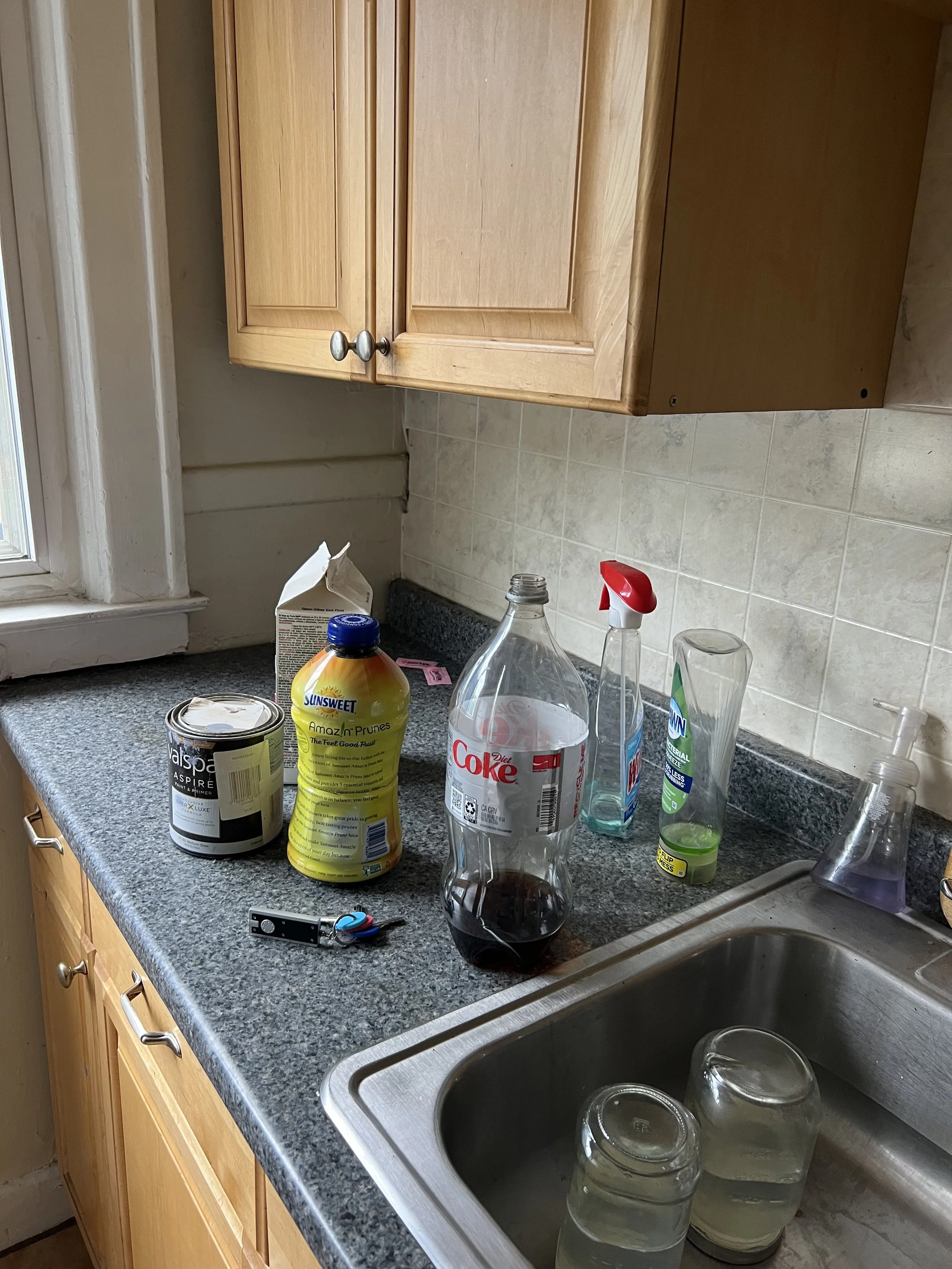
I ended up painting the living room myself and the image of the window and walls shows the new color I used. I also painted the windows frames and vynl parts of the windows, which you can see the start of in the picture.
Dealing with contractors for anything has been a STEEEP learning curve. Finding contractors with integrity and a sense of urgency to get things done in a timely and professional manner has been a huge challenge. I made the mistake of paying a deposit for a tree removal before any work was done. They came a month after I gave them a $1k deposit and cut the branch that least affected me. After several weeks of me nagging and further excuses and delays, I told them not to come back and found someone that finished the job promptly and professionally. I really learned a lot from this. Especially about negotiation, and how important it is to break things down to the basics. The deposit situation taught me to question everything from first principles and push back when something doesn’t add up.